O nás
|
Novinky
|
Produkty
|
Servis
|
Download
|
Kontakt
×
O NÁS
NOVINKY
PRODUKTY
DOWNLOAD
KONTAKT
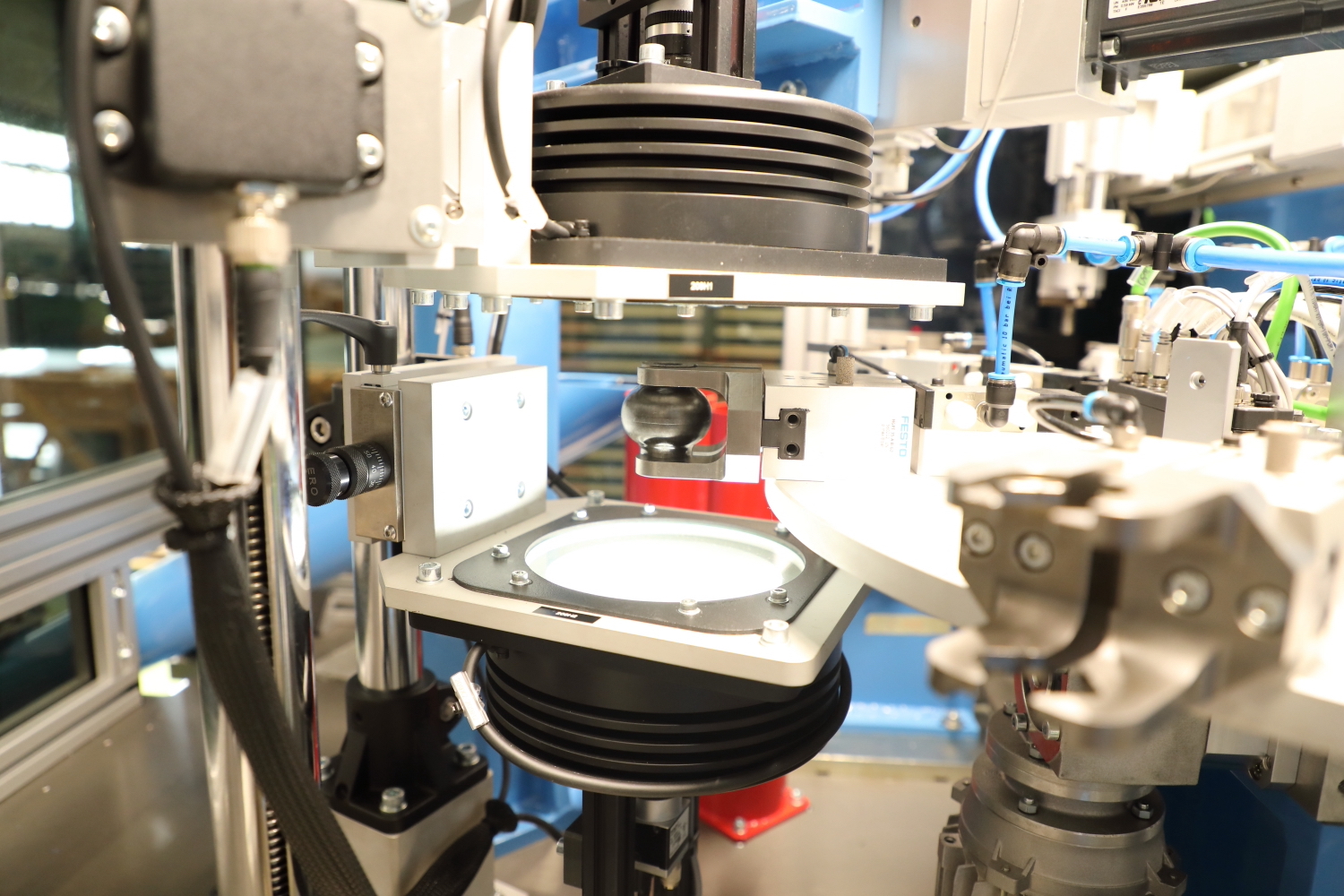
IRIS RT3 – Zákázkové řešení
Hlavní charakteristika
Rotační přesun na základě upínacích kleštin. (index režim-přerušovaný chod)
Pohled shora/z boku. (zadní světlo/přední světlo)
Fotometrická zkouška struktury (shora/zdola)
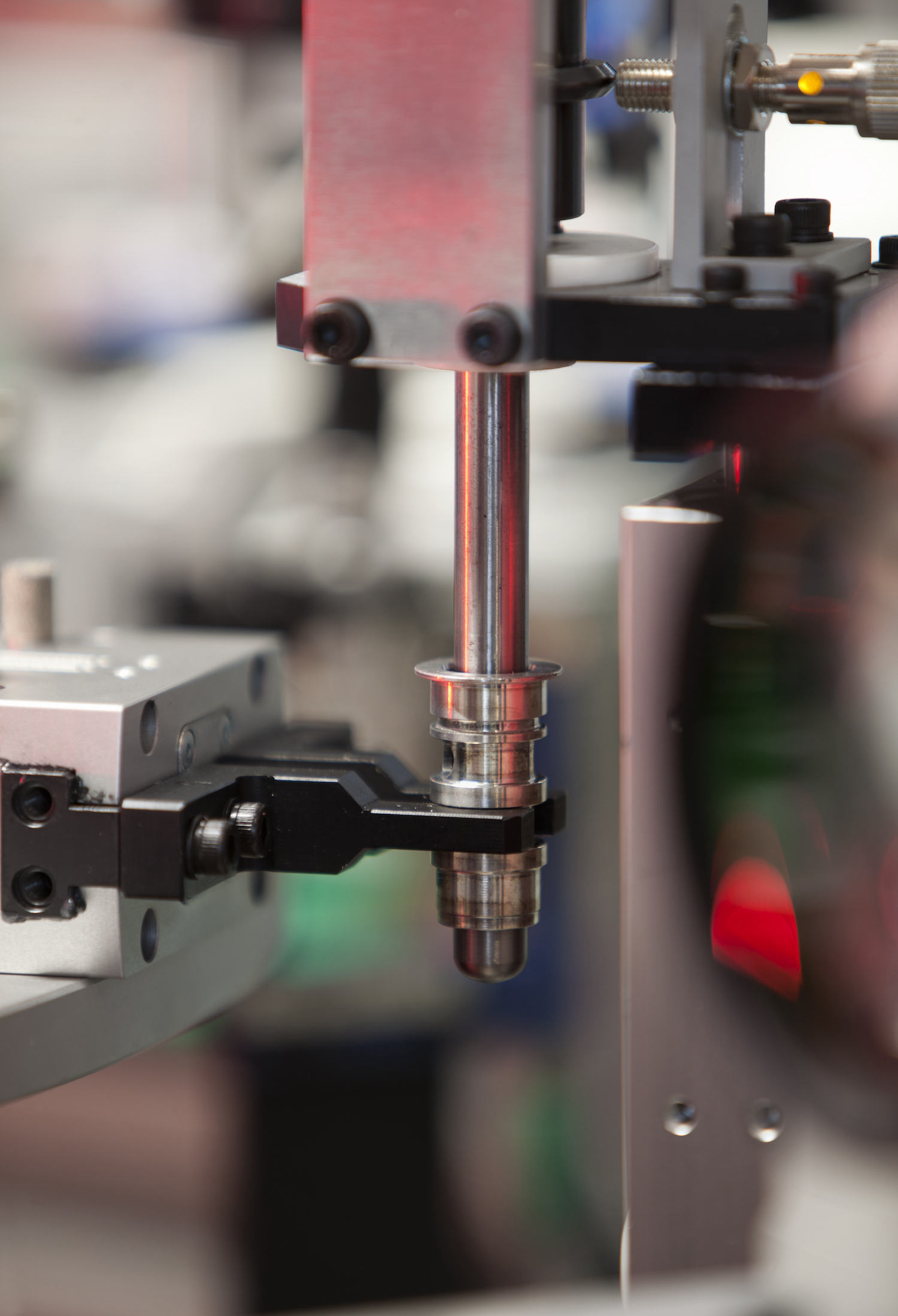
Boční fotomerie v 360º
Mechanická kontrola = vyhovuje/nevyhovuje
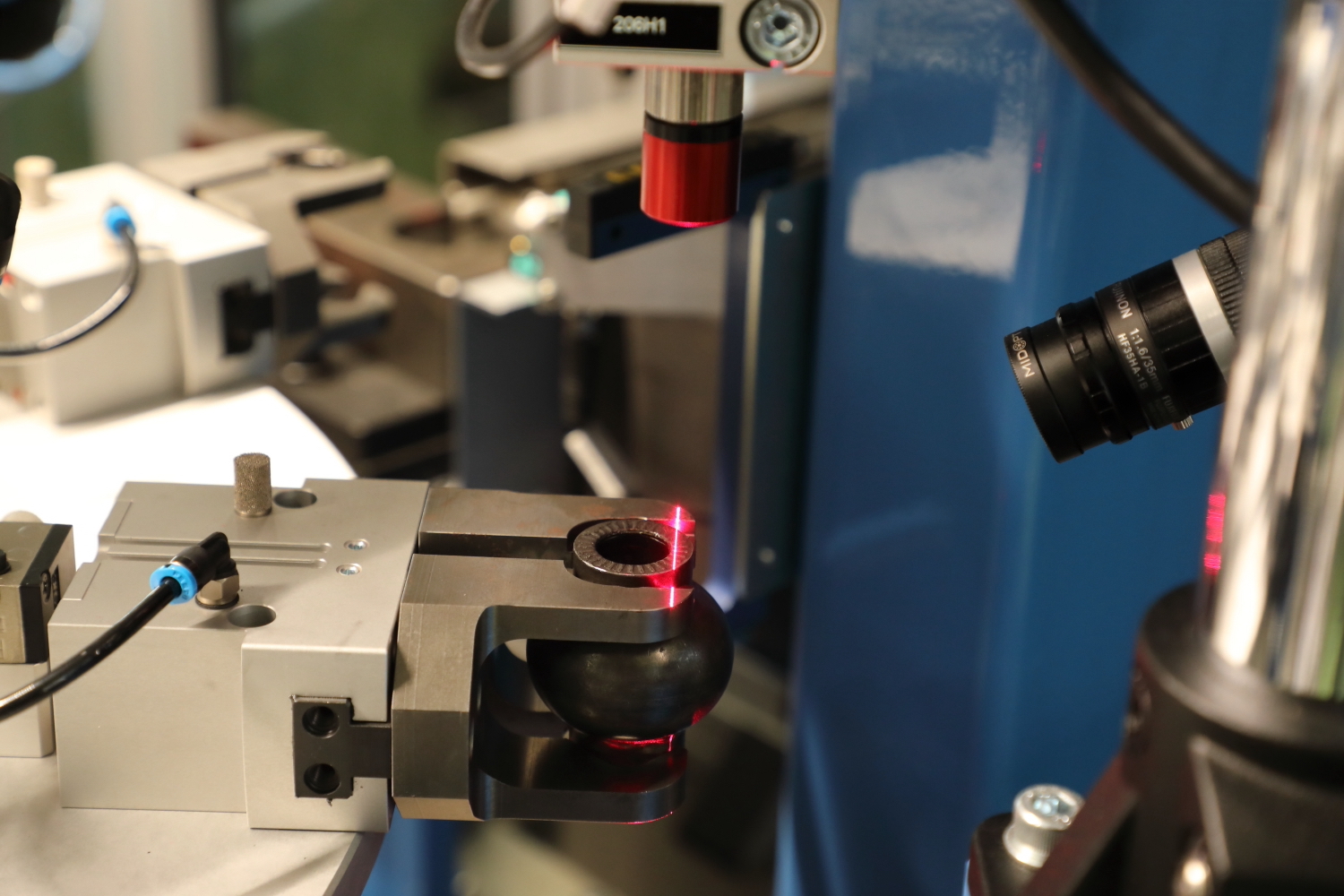
Kontrola vířivými proudy – struktura, praskliny
2 programovatelné výstupy NOT OK
Kontrola poškození závitů/relaminace
Trojrozměrná analýza povrchů laserem
Laserový tisk pomocí robota
Možnosti nahrávání/stahování
Robotické/mechanické podavače